AP-Class
2017-
Back then it was more like a challenge than a hobby.
Professional level: productive, Project volume: medium
I got into flying when I got a cheap supermarket drone. I flew it so mutch that its cheap plastic gears wore out. This hobby was still very new and the 450mm quad frame design was popular. I ordered the parts from china and one by one everything arrived.











Had many problems after the initial assembly and had to change some parts. As I had a 3D printer I could customize it exactly how I wanted. After a while I learned that the flight controller has a huge amount of inner logic and that it can be transmitted over the air and that there is a PC program that can display this data. I bought a telemetry transmitter set and learned how to use Mission Planner.


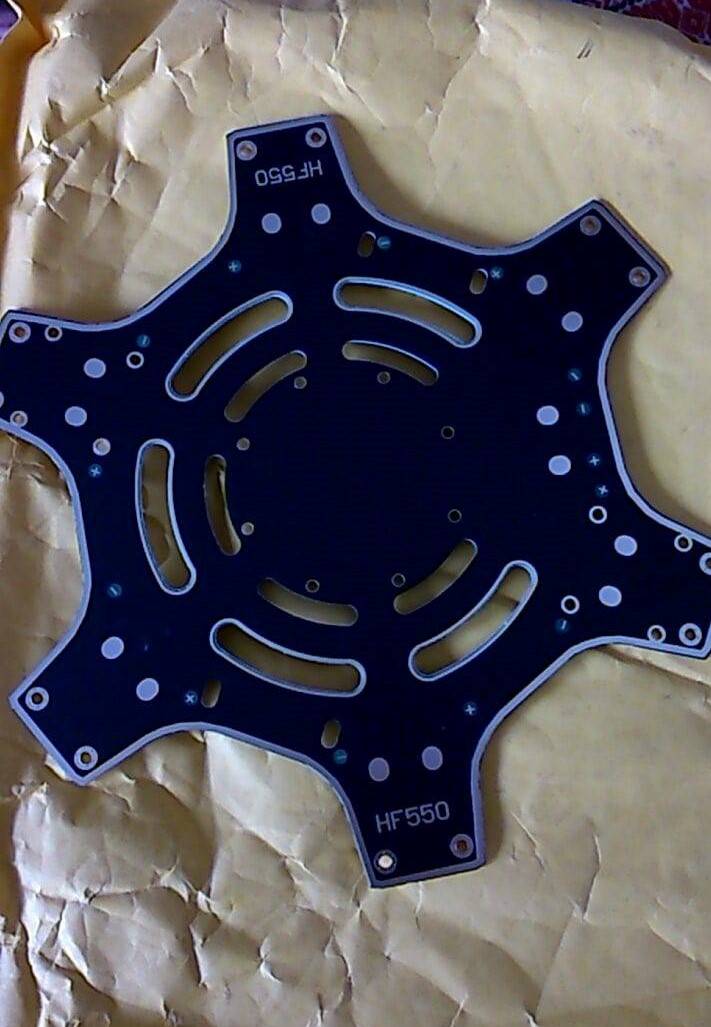
Later I built my second drone, a 5” freestyle quadcopter and upgraded the 450mm quadcopter into a 550mm hexacopter to be able to use it for mapping.


With the upgraded carry capacity I could start to experiment with the gimbal that I had since the beginning. At this point I had plans to use this big one for aerial photography which meant that a gimbal was a must have. Took me some time and a lot of digging into the depths of Mission Planner to get the FC to move the gimbal automatically.


Not every test was a success and had crased my bigger drones a few times as well. One of them was incomprehensible to me as it happened during an autonomous mission. After returning the black box data and doing some NTSB level aviation accident investigation, I found that the cause was that I probably misclicked when setting up the mission waypoints and set one of them to have an absolute altitude instead of an altitude above ground. Luckily this caused a rather soft yet unexpected landing.